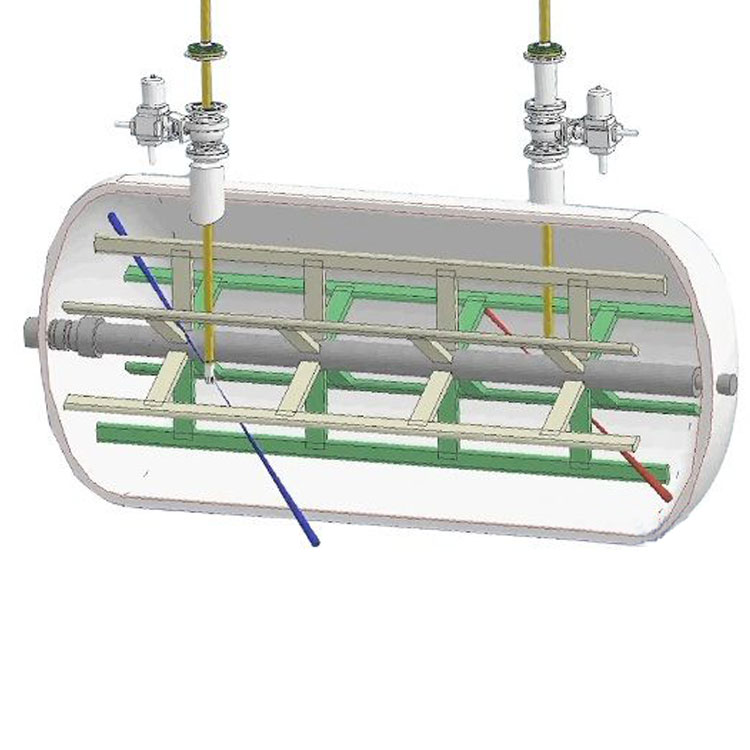
爬壁機器人的應用主要提高針對大型金屬罐體設備、大型機械裝置的特種檢測水平,提高維護人員在危險環境下作業的安全性,降低作業風險,提高工作效率,并帶來顯著的經濟效益和社會效益。其可運用于石化、造船、貨柜碼頭等企業,對其金屬罐或球形罐的內外壁面進行探傷、測厚等特種檢驗,金屬罐壁噴砂、除銹、噴漆、防腐等,并攜帶不同工程的裝置提高施工的效率、安全、環保問題。
爬壁機器人的主要吸附方式包括:負壓吸附、真空吸附、磁吸附、氣體推力吸附、粘性吸附和仿生學吸附等,磁力吸附式適用于導磁性材料構成的壁面,在保證吸附距離的前提下,能產生遠超其它吸附方式的吸附力,且受到壁面缺陷的影響較低,被廣泛應用在罐體金屬領域。
磁吸附式爬壁機器人依磁力來源可分為電磁式和永磁式兩種:電磁式爬壁機器人吸力可調節,但是突然斷電或電力不足將造成磁吸附力減小,進而可能引發機器人墜落事故;永磁式爬壁機器人的吸附力不受斷電影響,但吸附力大小受吸附距離影響且距離不易主動調節,目前,面向大型儲罐的除銹爬壁機器人,吸附方式主要采用永磁附技術。
儲罐表面工作環境復雜,爬壁機器人開展有效附壁行走需要極為可靠的結構與控制方法支撐。結構方面既需要適應復雜變化的壁面情況,也需要提供足夠的吸附力;控制方面既需要提供足夠定位精度,也需要保障期望的除銹效果。
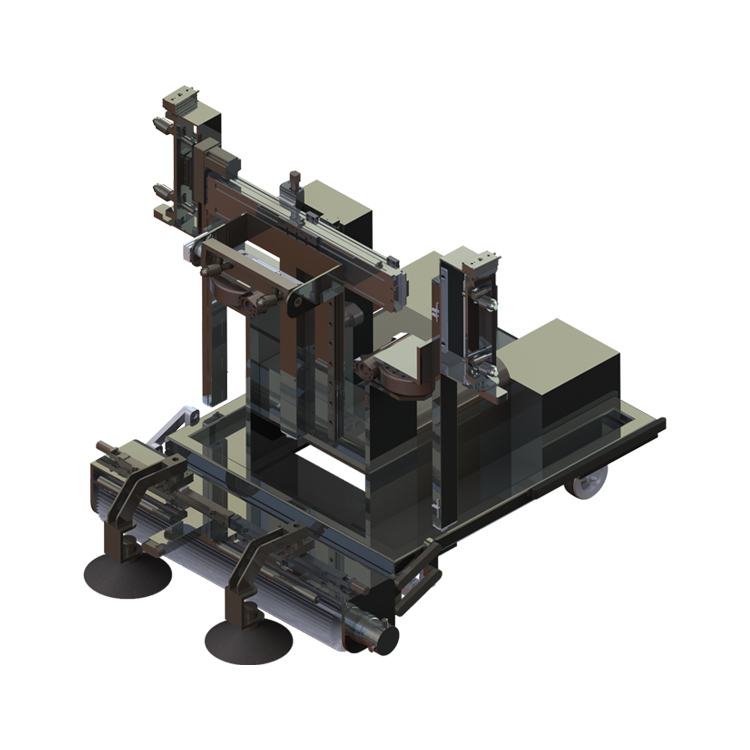
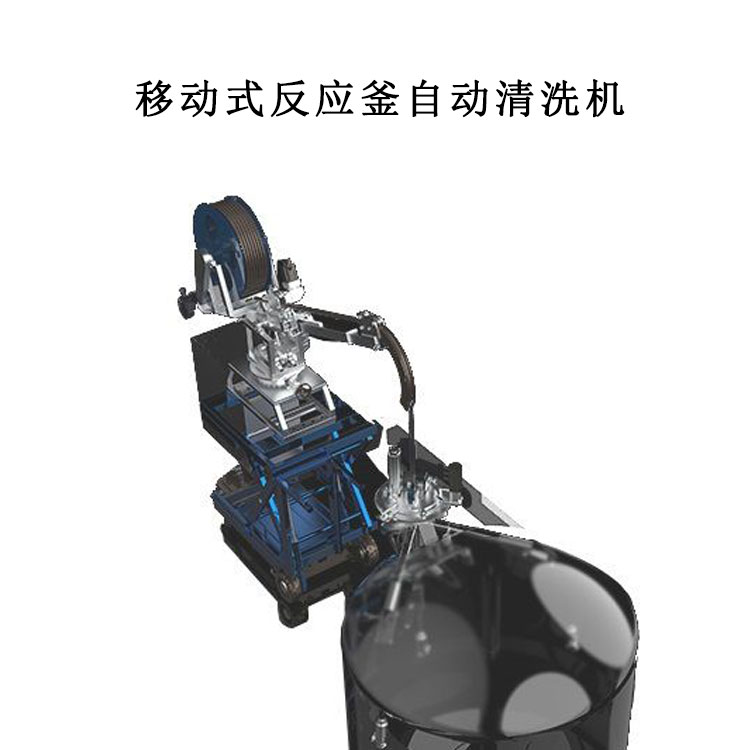
德高潔儲罐除銹爬壁機器人采用磁吸附與真空吸附相結合、輪式行走、四驅越野底盤,使得爬壁機器人具備強大的附壁行走能力,可攜帶150-200kg重量,應對2800bar反作用力,靈活移動在罐體表面,并具有一定的曲面越障能力,為除銹機器人在避免施工中提供完善的支撐力,可以替代人工進行安全穩定的高空作業,降低了人員傷害的風險。
德高潔儲罐除銹爬壁機器人,搭載除銹清洗器作業,行走機構、附壁機構、射流裝置、真空系統以及智能化控制系統設計于一體,通過人工手持遙控器控制機器人作業,超高壓清洗裝置快速剝離并沖洗掉罐體表面銹蝕、油污、灰塵、舊漆層等污垢,真空回收分離系統能夠將除銹過程中產生的廢水及廢渣回收掉地面處理,不僅節能環保,*重要的是能夠做到“即除即干”不返銹,實現快速施工,施工效率50-70㎡/h,除銹等級可達Sa2.5,是一套安全、環保、高效的儲罐外部除銹施工解決方案。